
مع تصنيع مرنة باعتبارها جوهر ، ومساعدة المصانع العالمية لتحقيق
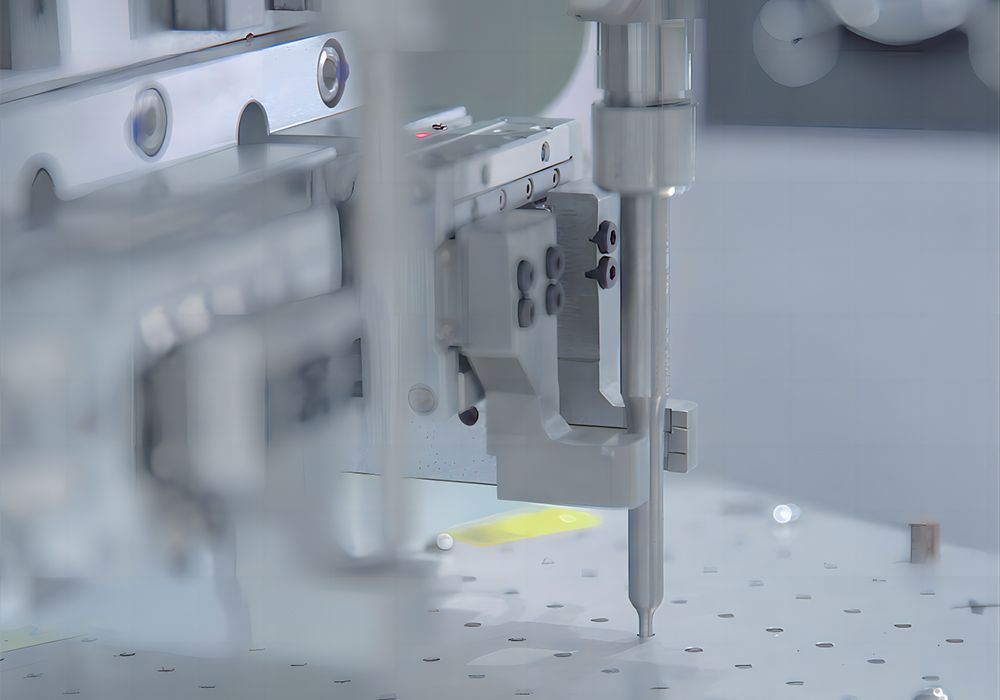
آلة تثبيت برغي قفل





| المعلمات الأساسية | |
| مواصفات المسمار | M0.6 ~ M8 |
| الطاقة | 900 واط |
| إمدادات الطاقة | AC 220V |
| التكرار | ±0.02 مم |
| طول الذراع |
المحور X 100 ~ 700 مم
المحور Y 100 ~ 300 مم المحور Z 100 مم |
|
سرعة الحركة |
المحور X/Y 1000 مم/ثانية
المحور Z 500 مم/ثانية |
| اختياري | |
| رؤية التموضع الثانوية | 00 لا / 01 نعم |
| رؤية الحركة | 00 لا / 01 نعم |
| كشف ارتفاع الطفو | 00 لا / 01 نعم |
| معايرة عزم تورك تلقائية | 00 لا / 01 نعم |
| المعلمات الأساسية | |
| مواصفات المسمار | M0.6 ~ M6 |
| الطاقة | 1500 واط |
| إمدادات الطاقة | AV220/10A |
| طول الذراع |
ذراع 1 محور 325 مم
ذراع 2 محور 265 مم |
|
التكرار |
1-2 مفاصل: ±0.02 مم
3 مفاصل: ±0.03 مم |
| اختياري | |
| رؤية التموضع الثانوية | 00 لا / 01 نعم |
| رؤية الحركة | 00 لا / 01 نعم |
| كشف ارتفاع الطفو | 00 لا / 01 نعم |
| معايرة عزم تورك تلقائية | 00 لا / 01 نعم |


| 1.5 ~ 3 ثانية/قطعة | الكفاءة | 5 ثانية/قطعة | |||
| 0-1/شخص | القوى العاملة | 2-3/أشخاص | |||
| تصل إلى 99.95% | العائد | يختلف من شخص لآخر | |||
|
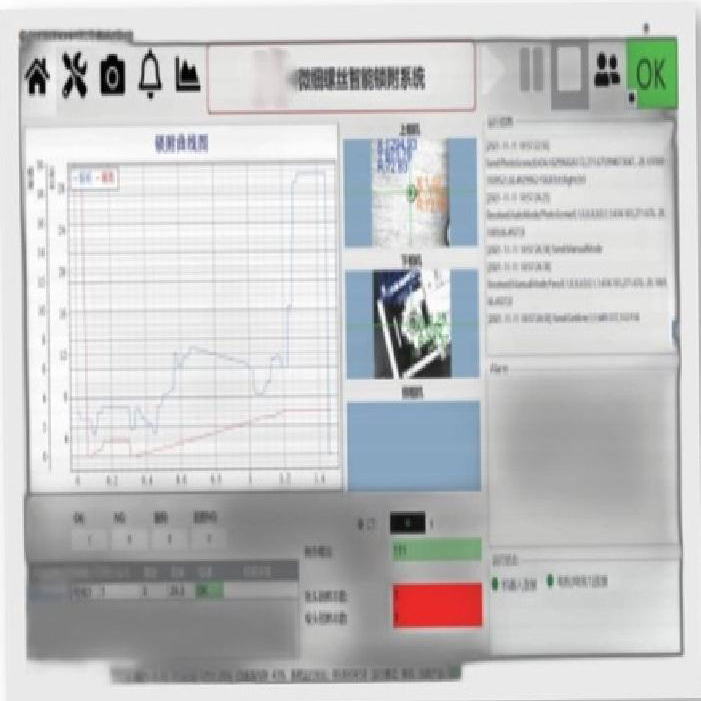
مراقبة في الوقت الحقيقي للعملية بأكملها للدفع الصارم والتنبيه في حالة الشذوذ
إنذار في حالة الشذوذ |
استثناء
التعامل |
الكشف اليدوي لا يمكن السيطرة عليه | |||
|
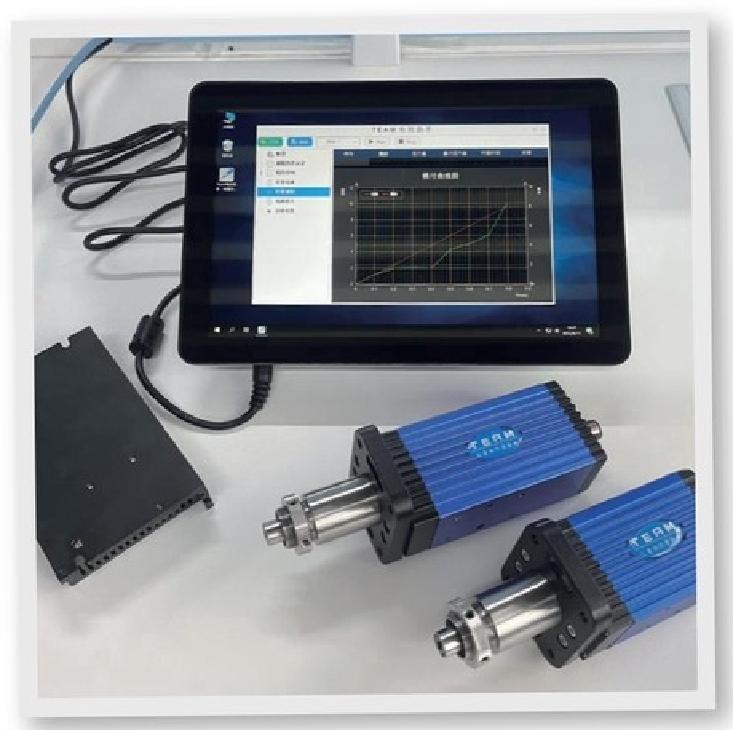
عالية الدقة
التحكم في عزم الدوران، مراقبة البيانات في الوقت الحقيقي والتعديل |
عزم الدوران
التحكم |
الاعتماد على تجربة الموظفين | |||
| تشغيل مستقر ولا تكاليف إدارية تقريبًا | تكاليف الإدارة |
ارتفاع معدل التحويل، جودة غير متسقة للموظفين وتكاليف إدارية عالية
استثمار مرة واحدة دون استثمار مستمر |
|||
|
تكاليف الإدخال
استثمار مستمر |
يواجه مشاكل مثل ارتفاع الأجور وتكاليف التوظيف المتزايدة |
Continuous investment
|
الإلكترونيات 3C
-
3C Electronics لتوفير حلول شد البراغي التلقائية وتجميعها تلقائيًا للهواتف المحمولة والأجهزة اللوحية وأجهزة الكمبيوتر وغيرها من منتجات الإلكترونيات الاستهلاكية.

-
تخزين الطاقة توفير حل شد البراغي العميق التلقائي لمعدات تخزين الطاقة الصغيرة.

-
أداة كهربائية توفير حل ربط براغي ذكي تلقائي لأدوات الطاقة.

-
السيارات توفير حلول ربط براغي ذكية لقطع غيار السيارات والأجزاء الداخلية والإلكترونيات السيارات، إلخ.






هل تعرف
لماذا تختارنا
ما هو الفرق بين الشد الذكي وروبوت الدفع؟
-
حصري للبراغي الدقيقة مصمم خصيصًا لأبحاث وتطوير البراغي الدقيقة، يمكن أن يدعم الأصغر M0.6 برغي محكم، السعي للدقة أكثر؛
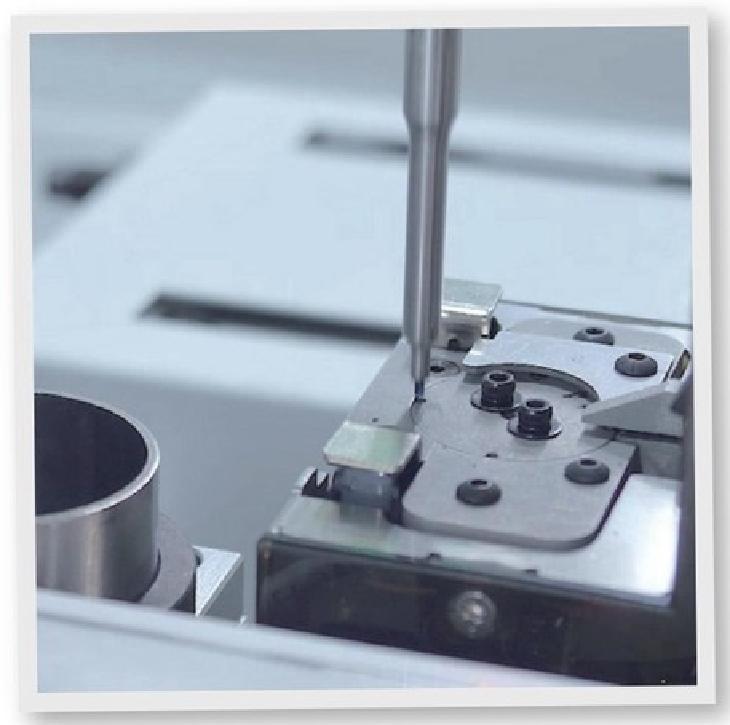
-
عملية النواة القابلة للتحكم البحث والتطوير المستقل للمكونات الأساسية وخوارزميات التحكم، دقة التحكم في عزم الدوران تصل إلى 3%، لتحقيق مهنية أكثر؛
-
عائد الدفع الشد أعلى برنامج الدفع الشد الخاص بهم، مراقبة الوقت الحقيقي لعملية الدفع الشد، المزيد من الانزلاق التكتيكي، كشف ارتفاع الطول، العائد يصل إلى 99.95%، لتحقيق استقرار أكثر؛
-
تطبيق سيناريوهات معقدة استكشاف سيناريو الشد الفعلي، وتطوير منتجات مناسبة لسيناريوهات خاصة مثل التداخل، الفتحة المخروطية، الجانب، إلخ،

التي تكون مناسبة لأكثر تعقيدًا؛


| كشف عزم الدوران، عدد الدورات، | ||
| ارتفاع الطول العائم، الميل والانزلاق | ||
|
حكم النتيجة موافق | |
|
ضبط عزم الدوران: √
ضبط عدد الدورات: √ |
على سبيل المثال، ضبط قيمة عزم الدوران على 1 نانومتر وشد عدد الدورات إلى 10.
بعد تنفيذ إجراء الشد، يتم إرجاع بيانات المراقبة في الوقت الحقيقي. عندما تصل قيمة عزم الدوران إلى 1 نانومتر ويصل عدد الدورات إلى 10 دورات، يقوم البرنامج بالحكم بأن نتيجة الشد موافقة ويخرج إشارة موافقة. |
|

|
حكم النتيجة غير موافق | |
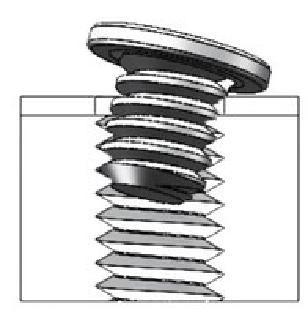
| 1. كشف ارتفاع الطول العائم | ||
|
على سبيل المثال، ضبط قيمة عزم الدوران على 1 نانومتر وشد
عدد الدورات حتى 10. بعد تنفيذ إجراء الشد، تظهر بيانات المراقبة الفورية للردود على البيانات أن قيمة عزم الدوران تصل إلى 1 نانومتر وعدد الدورات هو فقط 5. في هذا الوقت، يحكم البرنامج أن نتيجة الشد هي NG وفئة NG تطفو عاليًا، ويخرج إشارة NG. |
||
|
ضبط عزم الدوران: √
عدد الدورات المحدد: × نتيجة الحكم: ارتفاع الطفو |
||
|
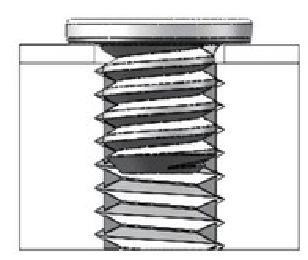
2. كشف الأسنان المنزلقة | |
| على سبيل المثال، ضبط قيمة عزم الدوران على 1 نانومتر وشد عدد الدورات إلى 10. | ||
|
بعد تنفيذ إجراء الشد، تظهر بيانات المراقبة الفورية
الردود تظهر أن عدد الدورات قد وصل إلى 10، وقيمة عزم الدوران كانت أقل من 1 نانومتر. في هذا الوقت، يحكم البرنامج أن نتيجة الشد هي NG، و فئة NG هي التوقف (الموضوع المنزلق)، ويخرج إشارة NG. |
||
|
تعيين عزم الدوران: ×
تعيين عدد الدورات: √ نتيجة الحكم: التوقف (الانزلاق) |
||






اتصل بنا
اتصل بنا
معلومات المنتج
الكمية
وحدة
قطعة
دعم طلب العينات، التخصيص، الجملة المباشرة، والدفع الكامل. إذا لم يكن المنتج الذي تبحث عنه يحتوي على محتوى مخصص مقابل، يرجى ملء النموذج أدناه للاتصال بنا، وسنرد في أقرب وقت ممكن.